




描述
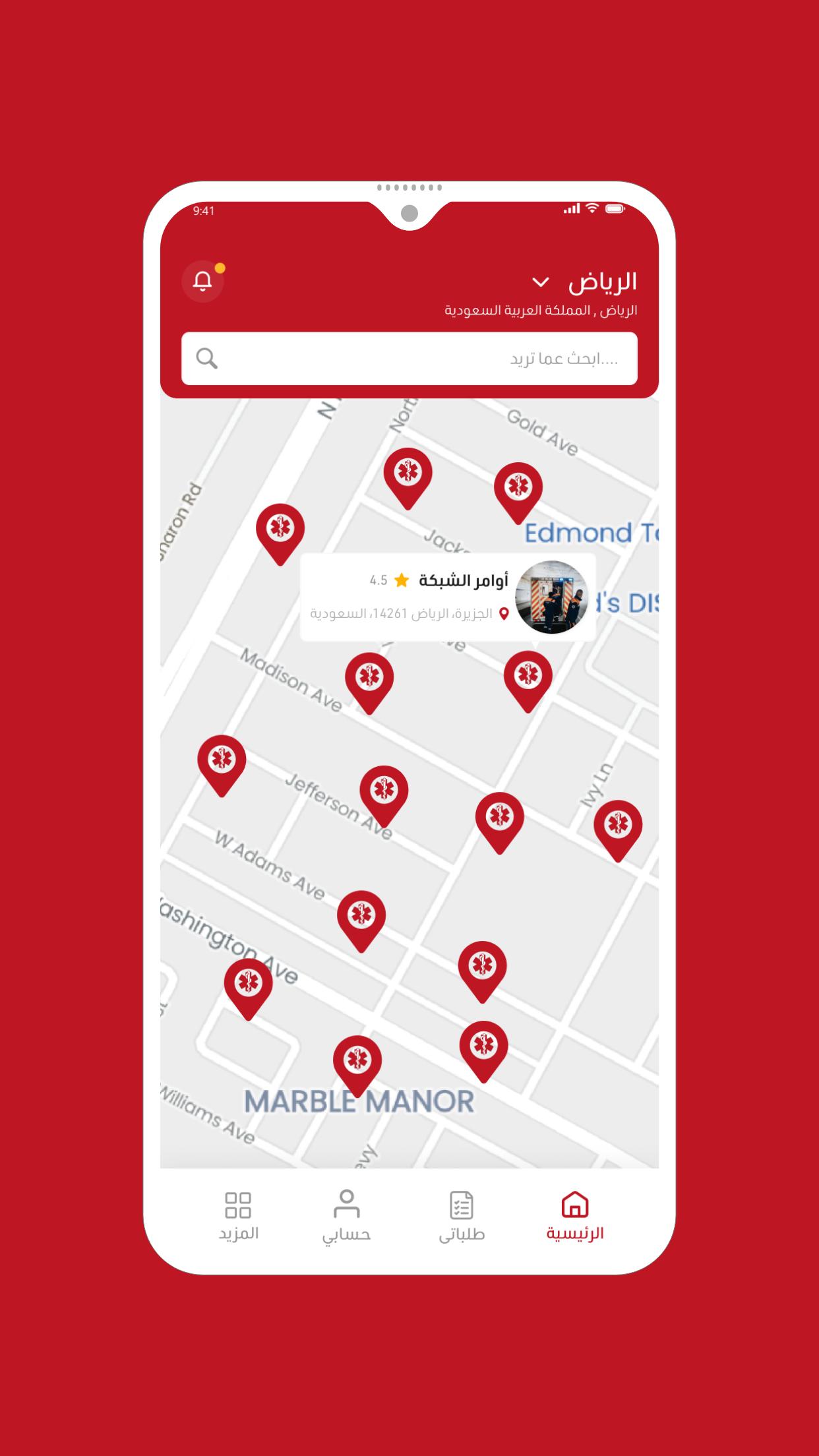
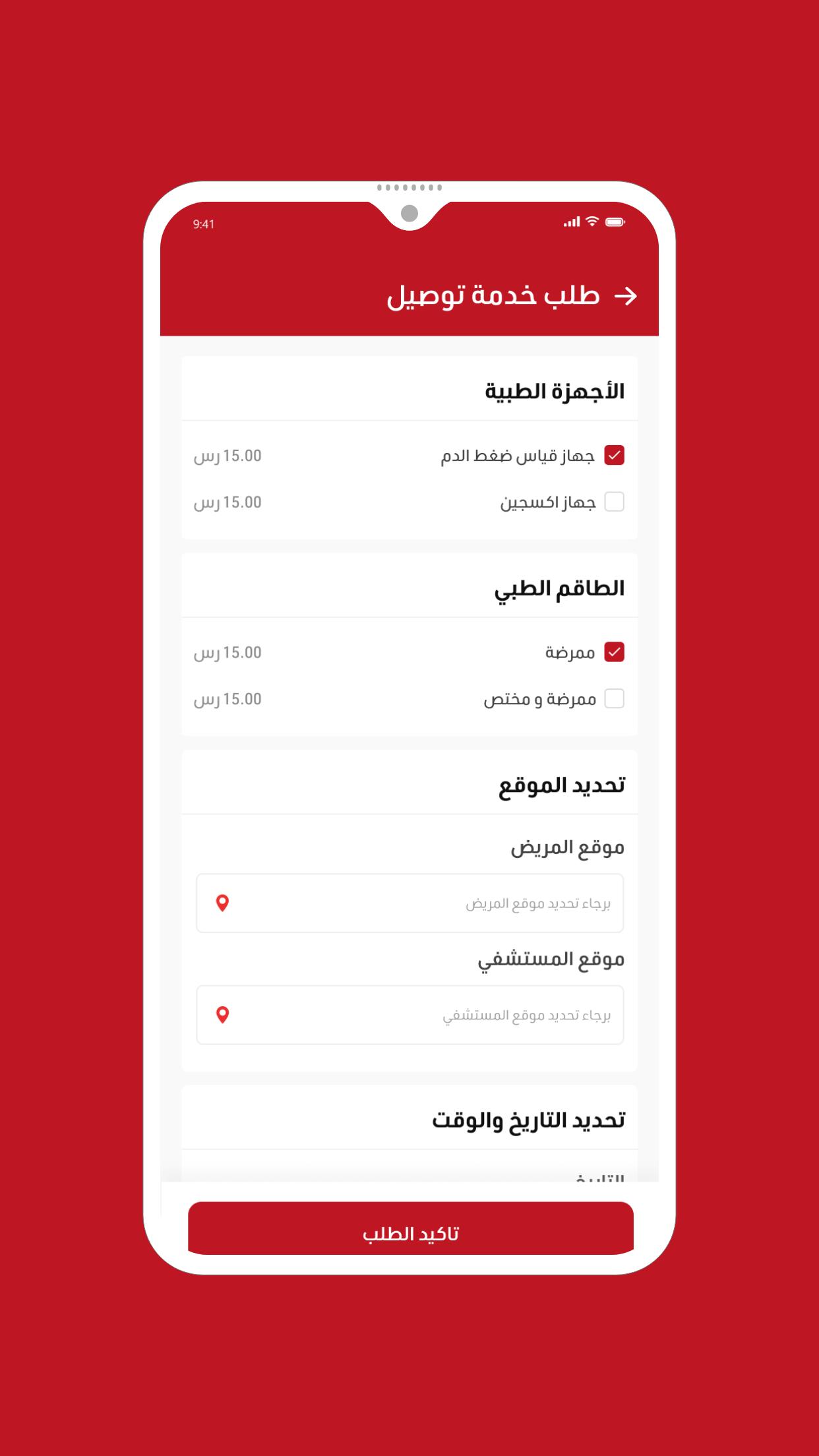
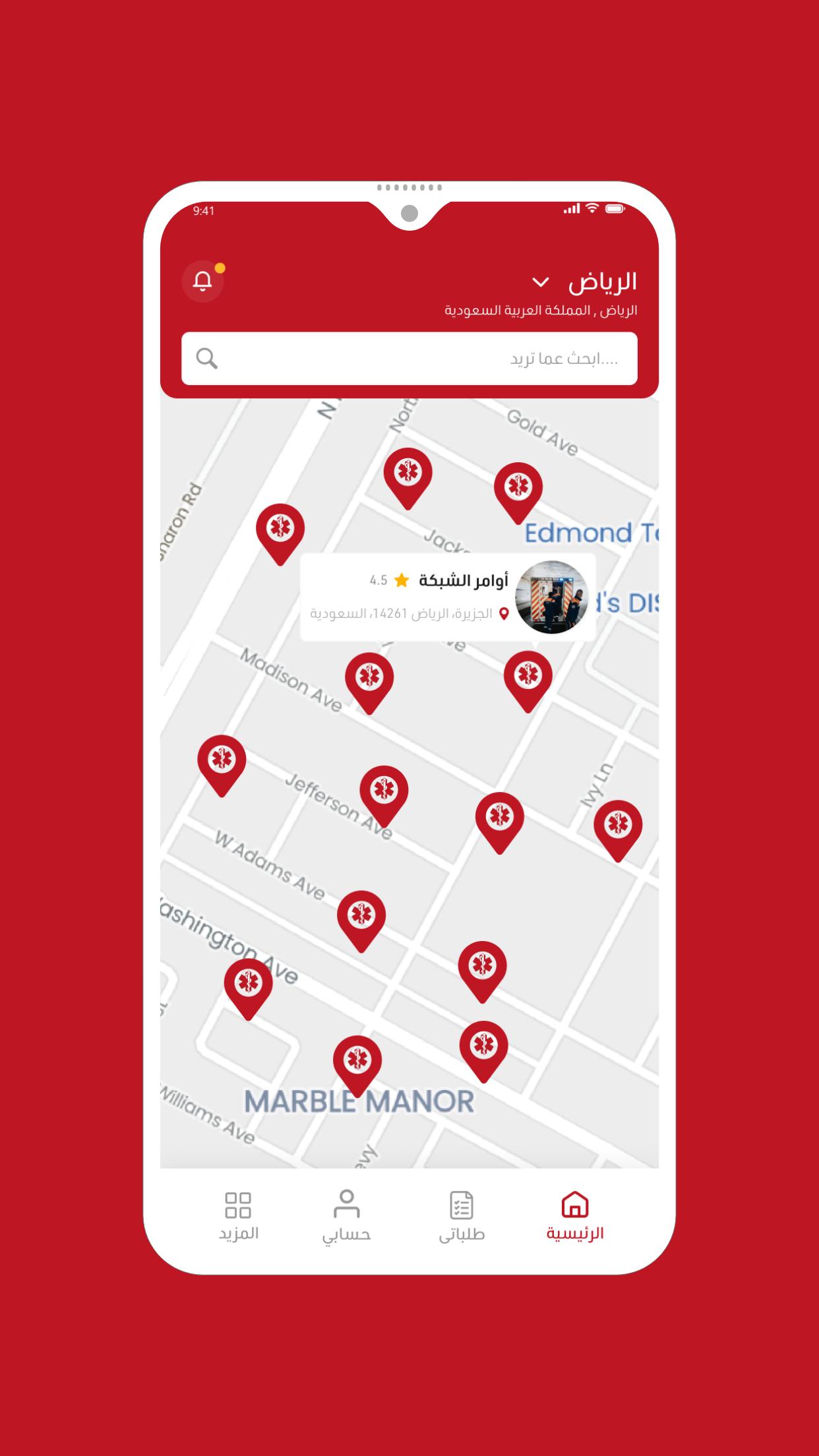
綜合醫療應用
連接患者與救護車運輸公司和醫院的應用程序
最新版本 1.0.8 的新增功能
最後更新於 2024 年 7 月 5 日
小錯誤修復和改進。安裝或更新到最新版本來查看!
RRT(快速探索隨機樹)RRT 是一種用於在高維度配置空間中規劃路徑的機率路線圖方法。它是一種基於採樣的演算法,增量建立從起始配置到目標配置的路徑樹。該樹是透過在配置空間中重複選擇隨機配置並向該配置擴展樹來建立的。擴展是透過在樹中找到距離隨機配置最近的頂點,然後沿著直線向隨機配置擴展樹來執行的。
與其他路徑規劃方法相比,RRT 有幾個優點。首先,它是一個易於實現的簡單演算法。其次,它是高效率的,可以用來規劃高維配置空間中的路徑。第三,它是機率性的,這意味著即使在沒有確定性路徑的情況下它也可以找到路徑。
RRT 已被用於解決各種路徑規劃問題,包括:
* 機器人運動規劃
* 自動駕駛車輛的路徑規劃
* 飛機路徑規劃
* 水下航行器路徑規劃
RRT 是路徑規劃的強大工具,它已被用來解決各種各樣的問題。這是一種實現簡單、高效且具機率性的演算法。這些優點使得 RRT 成為解決高維度配置空間中路徑規劃問題的良好選擇。
演算法
RRT演算法如下:
1. 使用啟動配置初始化樹。
2. 未達到目標配置時:
1. 在配置空間中選擇一個隨機配置。
2. 在樹中找出距離隨機配置最近的頂點。
3. 沿著直線向隨機配置延伸樹。
3. 返回從起始配置到目標配置的路徑。
變化
RRT 演算法有多種變體,包括:
* RRT*(具有最佳路徑的 RRT):RRT 的這種變體使用啟發式方法來選擇下一個配置來擴展樹。這種啟發式方法有助於找到比原始 RRT 演算法更短的路徑。
* RRT-Connect:RRT 的這種變體連接兩棵樹,一棵從起始配置開始,一棵從目標配置開始。此變體用於在沒有確定性路徑的情況下尋找路徑。
* RRT-X:RRT 的這種變體旨在尋找高維配置空間中的路徑。它使用不同的方法來選擇下一個配置以將樹擴展到。
應用領域
RRT 已被用於解決各種路徑規劃問題,包括:
* 機器人運動規劃:RRT 已用於規劃機器人在各種環境中的路徑,包括工廠、倉庫和家庭。
* 自動駕駛汽車的路徑規劃:RRT已被用於規劃自動駕駛汽車在各種環境中的路徑,包括道路、高速公路和停車場。
* 飛機路徑規劃:RRT 已用於規劃飛機在各種環境下的路徑,包括機場、空域和山區。
* 水下航行器的路徑規劃:RRT已被用於規劃水下航行器在各種環境中的路徑,包括海洋、湖泊和河流。
RRT 是路徑規劃的強大工具,它已被用來解決各種各樣的問題。這是一種實現簡單、高效且具機率性的演算法。這些優點使得 RRT 成為解決高維度配置空間中路徑規劃問題的良好選擇。
資訊
版本
1.0.8
發布日期
2024 年 7 月 5 日
文件大小
30.1MB
類別
醫療的
需要安卓系統
安卓5.1+
開發商
整件事情
安裝量
1K+
ID
sa.aait.flutterTeam.rrt
可用於
相關文章
-
如何在重賽中拍攝更好的鏡頭
在您必須在重賽中進球的工具中,拍攝是最基本和最重要的工具。為了幫助實現目標,您需要針對目標 - 屏幕上的兩個白色括號1 讀
2025年6月20日

-
如何在Fortnite中完成“煎鍋計劃”
“煎鍋計劃”是Fortnite第6章第3季中隱藏的島嶼故事探索線。當您通過Midas的“ Golden Shadow” Island Story Quest系列進步,您將被要求完成“技能”1 讀
2025年6月20日

-
最好的變化在變化中解鎖訂單
最佳的變化是揚·多爾斯基斯(Jan Dolskis),他們解鎖新物品或產生大量資源,最好不要煽動叛亂。不要低估最後一部分,因為1 讀
2025年6月19日

-
“埃爾登的法律之環:夜晚的著陸”分享了風暴成就的解決方案
“夜晚的埃爾登戒指”中的風暴成就是遊戲中相對困難的成就。這項成就的要求是指導突襲的“風暴”。在一次攻擊任務中,遇到巨大的泡沫並進入,並在其中打敗了老闆的“標誌”。所需的準備工作是睡覺並消除特殊的地形,然後選擇冰龍攻擊。埃爾登(Elden)的法國戒指路的夜王的風暴的成就如何使成就攻擊“風暴”。在一次攻擊任務中,您遇到了巨大的氣泡並進入,擊敗了老闆的“標誌”。在繼續之前準備:睡覺時消除特殊地形,選擇冰龍在攻擊後攻擊並註意1 讀
2025年6月19日